在社交媒体上共享
NV08C系列产品
发表 2011/01/03



NV08C-RTK-A,除了NV08C-RTK实时动态差分功能,还支持双天线航向应用。 航向无需基站或参考信息源支持。其中1#主天线提供位置、用于Rover或Base,2#次天线提供航向。 应用如GPS罗经、无人机飞行控制、农业机械自动驾驶、协同作业机械控制等。
NV08C-RTK、NV089C-RTK-A真北向速度命令:PNVGVOG。
$PNVGVOG,hhmmss.s-s,х.x,х.x,х.x,a*hh


4.NV08C-BRD补充特点
NV08C-BRD支持原始数据(伪距观测值,载波相位观测值,积分多普勒伪距值)输出、后处理等。类似于NV08C-CSM。NV08C-BRD没有内部UART转化USB芯片,实际上是NV08C-CSM在板上。如果用电脑USB通信端口简便测试,需要TTL(+3.3V)转USB线。
自由设置支持Glonass、北斗、SBAS及组合: $PKON1,x,x,c-c,c-c,xxxx,a*hh
5.NV08C-MiniCPI-E补充特点
NV08C-MiniPCI-E支持BINR二进制和原始数据输出,不提供后处理软件工具。只有一个通信端口NMEA+RTCM混合在一个通信端口,这样支持DGNSS。另外,使用BINR二进制message69H发送RTCM数据到NV08C,能自动使用NMEA和发送RTCM,以致一个数通信口输出NMEA和输入RTCM。

6. NV08C支持支持实时PPP(单点精密定位)吗?
实时PPP(单点精密定位)需要L1和L2,因为NV08C-CSM、NV08C-BRD、NV08C-MiniPCI-E支持L1,所以不能做PPP。
NV08C-RTK-M、NV216C-RTK-A支持PPP。
7. L1/L2与L1到底有什么不同?
(消除了电离层误差)。L1测量需要使用电离层高精度模型较好地补偿误差(无法消除电离层误差)。但如果采用的CORS虚拟参考站已经消除电离层误差,如台湾国土部门CORS站,RTK L1板卡与RTK L1/L2就几乎没有差别。
L1/L2接收机支持实时PPP(单点精密定位 ),L1接收机支持后处理。
NV08C-RTKL1单频GNSS板卡性能不亚于双频板卡,能经济地满足一般实时差分需要。
得益于NV08C-CSM提供高质量的原始数据和先进的RTK算法,解算可靠、输出RTK精度高。GPS、Glonass足够多卫星,良好环境下丢星几乎不会发生。NV08C-RTK可以替代部分双频RTK板卡。
NV08C-RTK作业距离10公里为限,要求严格的大地测量精度时需要优质的双频/多频GNSS板卡,后者大致30公里作业半径。
用过市面上L1单频RTK板卡,遇到丢星、精度低等不佳体验,源于其GNSS模块或FPGA板卡提供的原始数据质量差、不可靠,加上RTK算法上的缺陷、低稳定性。NV08C-RTK完全可以替代部分双频RTK板卡。
NV08C-RTK虽然是L1/G1单频RTK板卡,但由于NV08C-CSM模块支持码群延(或称绝对测距误差)修正,载波相位的超前(或称相对测距误差)修正,多普勒频移(或称距速误差)修正等,实际上适合多数高精度应用要求,如测量、GIS、无人机UAV、机械控制和精准农业等。工程师不建议NV08C-RTK应用于用户站离基站超过10公里的场合。
NV08C-RTK-M为支持L1/L2、G1/G2、B1/B2双频板卡即将上市,换句话说作业半径30公里。
在GPS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分,在精度要求高,接收机间距离较远时(大气有明显差别),应选用双频接收机。 电离层误差是GPS测量中的主要误差,是限制单频GPS接收机的测程不能超过20km的决定因素。电离层对GPS测量的主要影响有七种:信号调制的码群延(或称绝对测距误差),载波相位的超前(或称相对测距误差),多普勒频移(或称距速误差),电离折射同高度角的关系,振幅闪烁,磁暴对GPS的影响,电离层对差分GPS的影响。电离层特性高出地球表面50—1000km的大气层称为电离层。电离层是一种微弱的电离气体,它能以各种方式影响电波传播。
过去多频GPS接收机比单频GPS接收机具有更高的信号捕获灵敏度、更强的抗干扰性能和更高的定位精度,但三频GPS接收机相比于双频GPS接收机却没有太大的优势,因为双频GPS接收机已能实现电离层误差的精确补偿,且三频GPS接收机在抗干扰方面没有太大的提高。 现在,因为NV08C-CSM及NV08C-RTK等都是真正多星系同时工作。有足够多的卫星供捕获、足够强的信号供定位,越来越多开发者用来替代双频、多频板卡。今后,随着CORS站、虚拟参考站的普及与平民化,如向公众开放高精度差分广播,NV08C-RTK的优势将更加明显。在目前阶段,不得不说长达几千公里的精密定位还是要用双频或多频板卡。 NV08C-RTK-M为双频RTK板卡。
8.有没有实际高精度测试数据可参考?
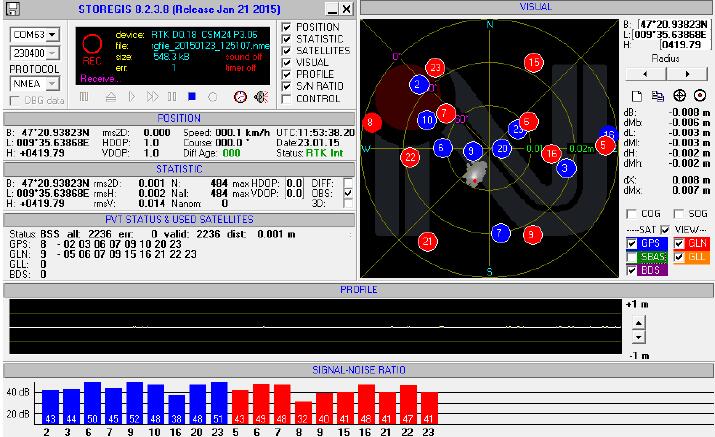
我们进行了很多高精度测试,如NV08C-RTK、NV08C-RTK-A,后者包含定向、航向。
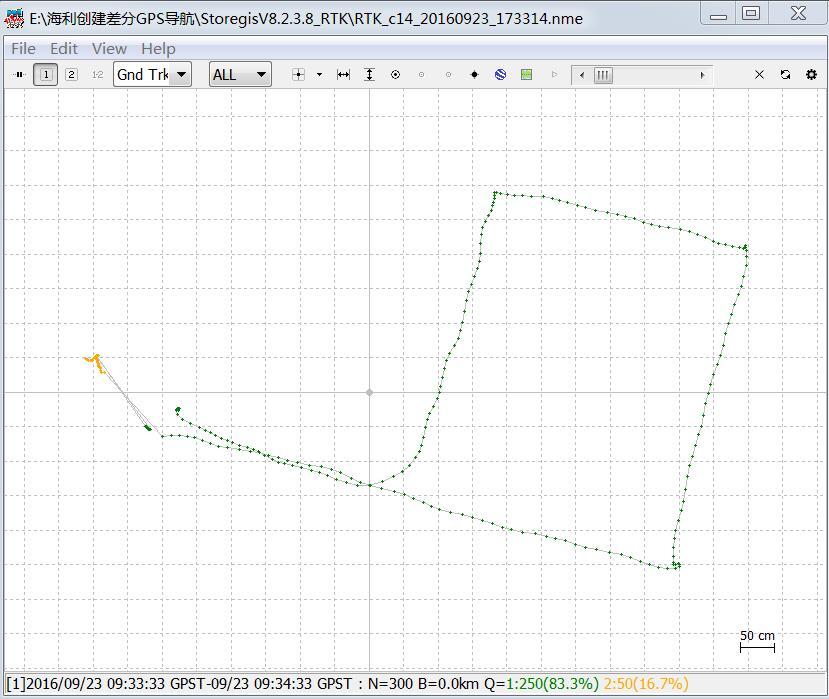
如下是来自某航空摄影客户测试NV08C-RTK的数据:
最上面是3D浮点精度,依次是纬度误差,经度误差,高程误差
图中纵坐标1小格是1mm误差,纬度、经度误差-1~+1mm,高程误差-3~+2mm(极大部分点落在此区域)
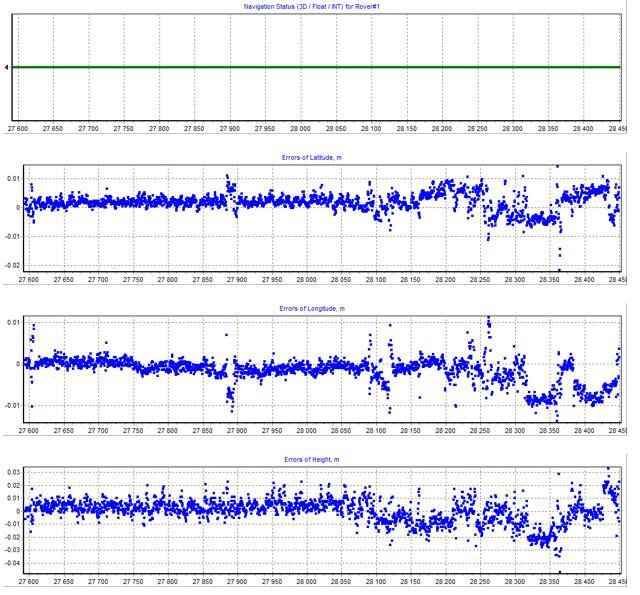
自上至下纬度误差分布图、经度误差分布图、高程误差分布图:
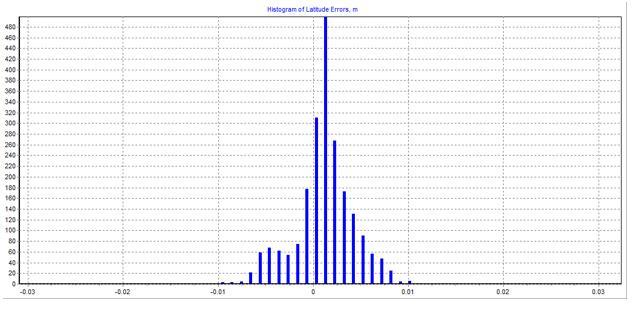
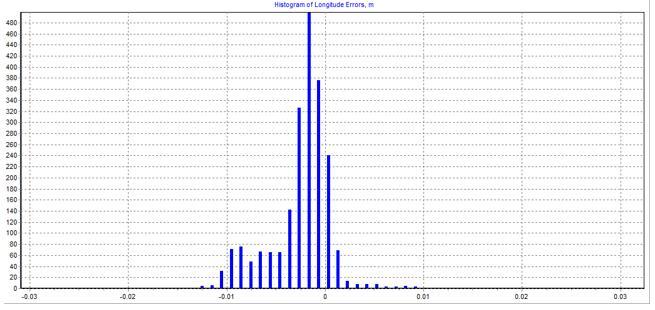
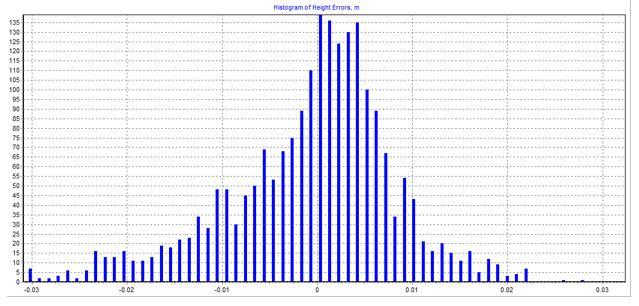
图中横坐标1小格是1mm误差,纬度、经度误差-1~+1mm,高程误差-3~+2mm(极大部分点落在此区域):
9. DGNSS与RTK
虽然同样依赖2台接收机工作,DGNSS差分与RTK实时动态差分(又称载波相位差分)还是不同。
DGNSS系统,举例一台高性能接收机(如NV08C-RTK,基站),一台NV08C-CSM接收机(流动站),NV08C-CSM接收到基站发出的RTCMv2.x电文messages #1和#31。
RTCMv2.x并不使用基站坐标。
message #1为所有可视GPS卫星改正电文。
message #31为所有可视Glonass卫星改正电文。
DGNSS system, RTCMv2.x messages #1 and #31
RTCMv2.x does not need to use base coordinates
message #1 is corrections for all visible GPS SVs
message #31 is corrections for all visible GLONASS SVs
RTK系统,流动站接收基站发出的RTCMv3.x电文,RTCMv3.x电文包含原始数据,流动端需要基站坐标计算、改正原始数据。
GPS & GLONASS改正信息(RTCMv2.x) ,或者是GPS & GLONASS原始数据+ 基站坐标(RTCMv3.x) 都能提高精度。
基站坐标输入两条命令即可$PNVGRTL,BASEXYZ或$PNVGRTL,BASEBLH。
原始数据或当前可视卫星的改正信息是DGNSS或RTK观测的主要部分,基站坐标数据对RTK是必要的但并不足够,主要改正源仍然是观测基站可视卫星的原始数据。
Base transmits RTCM messages 1002, 1006, 1010
1006 is message with Base coordinates
1002 - raw data for GPS
1010 - raw data for GLONASS
all these messages are necessary for RTK
1006 message only is not enough.
RTCMv3.x contains raw data and therefore needs base coordinates to calculate raw data corrections on Rover side,
but raw data or corrections for currently visible SVs is the main part of DGNSS or RTK method, base coordinates are just necessary information but not all, the main correction source here is raw data from visible SVs which are measured at Base Station side.
附:RTCM现有不同版本(括号内容表示变化)
RTCM 2.0 :仅用于DGPS (Code Correction-->DGPS)
RTCM 2.1 : 添加载波相位数据和RTK修正数据 (Code+Phase Correction-->RTK )
RTCM 2.2 : 包括了GLONASS 数据和相关信息 (...+Glonass)
RTCM 2.3 : 增加antenna types (message 23) ARP information (message 24) (...+GPS Antenna Definition)
RTCM 3.0 : RTCM 2.3 requires 4800 bps to broadcast dual-frequency code and carrier-phase observation corrections of 12 satellites. The information content is send with 1800 bps in RTCM 3.0 。增加了新的GNSS系统 (...+ Network RTK & GNSS)
GPS RTK Observations
1001 GPS L1 observations
1002 GPS L1 observations, extended information 1)
1003 GPS L1+L2 observations
1004 GPS L1+L2 observations, extended information 1)
1) Extended information contains Signal-to-Noise (CNO) and full milliseconds for code observations.
Stationary Antenna Reference Point
1005 ARP station coordinates, ECEF XYZ
1006 ARP station coordinates, ECEF XYZ and extended information 2)
2) Extended information contains the antenna height.
Antenna Description
1007 antenna type
1008 antenna type, extended information 3)
3) Extended information contains the antenna serial number.
GLONASS Observations
1009 GLONASS L1 observations
1010 GLONASS L1 observations, extended information 4)
1011 GLONASS L1+L2 observations
1012 GLONASS L1+L2 observations, extended information 4)
4) Extended information contains Signal-to-Noise (CNO) and full milliseconds for code observations.
System Parameters
1013 system parameters, list of transmitted message types and update rates
RTCM 3.1
Network Message
1014 Network Auxiliary Station Data
coordinate difference between one Aux station and the master station
1015 GPS Ionospheric Correction Differences for all satellites between one Aux station and the master station
1016 GPS Geometric Correction Differences for all satellites between one Aux station and the master station
1017 GPS Combined Geometric and Ionospheric Correction Differences for all satellites between one Aux station and the master station
(same content as both types 1015 and 1016 together, but less size)
1018 RESERVED for Alternative Ionospheric Correction Difference Message.Message type 1018 is not yet defined.
Ephemeris Data
1019 GPS Ephemeris
1020 GLONASS Ephemeris
UTF8 Text Message
1029 Text in UTF8 format (max. 127 multibyte characters and max. 255 bytes)
RTCM 3.1 Addendum 1
Transformation Message
1021 Helmert / Abridged Molodenski Transformation
1022 Molodenski-Badekas Transformation
1023 Transformation Residual Message, ellipsoidal grid representation
1024 Transformation Residual Message, plane grid representation
1025 Projection types except LCC2SP, OM
1026 Projection type Lambert Conic Conformal (LCC2SP)
1027 Projection type Oblique Mercator (OM)
1028 RESERVED for Global to Plate Fixed Transformation(Message type 1028 is not yet defined.)
RTCM 3.1 Addendum 2
Network Residuals Messages
1030 GPS Network Residuals
1031 GLONASS Network Residuals
ARP Message for VRS
1032 ARP station coordinates, ECEF XYZ of real reference station
Receiver and Antenna Descriptor
1033 Receiver and Antenna Descriptor
RTCM 3.1 Further Addendums
Further message types proposed for the next future are FKP for GPS and GLONASS, and MAC for GLONASS.
Network FKP Messages
1034 GPS FKP
1035 GLONASS FKP
10.NV08C-RTK相对坐标还是绝对坐标,以及不能
NV08C-RTK支持PPK(实时后处理)。NV08C-RTK支持输出二进制原始数据(raw data),能转换为RINEX,需要带RTK引擎后处理软件工具,如RTKlib,参考www.rtklib.com。
以虚拟参考VRS、CORS站作基站,由于输入的准确度很高的基站位置坐标,NV08C-RTK流动站输出的位置坐标为绝对坐标。一对NV08C-RTK分别作为基站、流动站工作,后者输出的只是相对坐标。
囿于内部结构及运算机制局限,NV08C-RTK不适合要求延时非常小(如小于10毫秒)的场合,NovAtel CPT也不能!此时,需要用到其它惯性导航模块,如Spatial延时(Latency)仅仅0.4毫秒。
NV08C-RTK延时50毫秒(目前FW)。延时取决于电路设计。从NV08C-CSM获取数据计算新位置需要时间,数据交换大约20-30毫秒。
11.北斗原始数据、差分
0xF4 : 二进制包含原始数据请求指令; 0xF5 : 原始数据包括所有跟踪到的卫星; 包含原始数据观测值:伪距、载波相位、多普勒和信噪比。数据大小【28+(30*所用通道数)】比特.
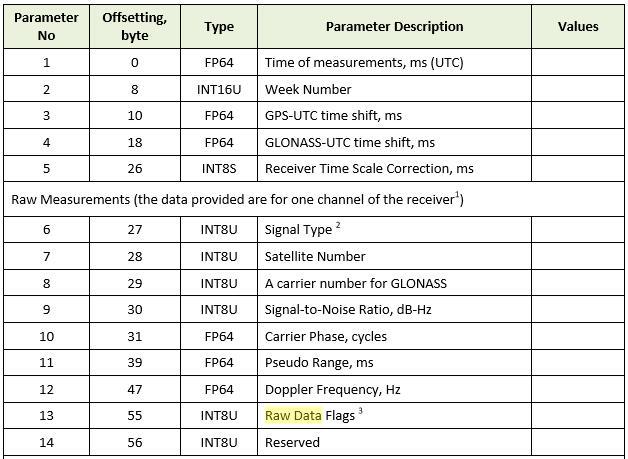
1 - 该电文仅包含接收卫星的测量结果
2 - 信号类型由掩码决定: 0x01 - GLONASS 0x02 - GPS 0x04 - SBAS 0x08 - 伽利略 0x09 - 北斗
3 - 测量标志由掩码确定: 0x01 - 信号(跟踪) 0x02 - 毫秒伪距/多普勒频率测量 0x04 - 伪距测量平滑 0x08 - 载波相位测量 0x10 - 信号时间可用(完全伪距) 0x20 - 未检测到前导码(载波相位的半周期模糊度)。
我国多项北斗国际标准提案,已被国际海事无线电技术委员会RTCM第104专业委员会(RTCM SC-104)接受。随着北斗进入RTCM、NMEA、IGS、NGS等国际系列标准,北斗的作用、威力将大大增强。但目前相比Glonass进入RTCM3.1标准,北斗做得远远不够。 NV08C-CSM默认串口2为BINR,需要设置为RTCM,支持RTCM v2.x messages #1与 #31. Message #1 是GPS corrections, message #31是GLONASS corrections。由于北斗差分相关信息没有公开,目前固件(Firmware)不支持北斗RTCM,待将来升级FW可以完全支持GPS、北斗差分RTCM,目前版本只支持GPS差分RTCM v2.x messages #1、Glonass差分RTCM message #31。 NV08C-CSM v5.x支持 北斗RTCM。
12.NV08C-RTK设置
出厂默认设置
NV08C-RTK UART1口预设为NMEA, 115200 bps: 输出电文/数据率: GGA/1, RMC/1, GSV/1, GSA/1, RZD/1, GBS/10 (详情参考 NV08C Receivers NMEA Protocol Specification)
NV08C-RTK UART 2口预设BINR, 115200 bps。
BINR协议通信在用户请求下才输出电文 (详情参考NV08C Receivers BINR Protocol Specification)。
NMEA协议通讯UART口必须设置为1 start - 8data - 1 stop。
BINR协议UART口必须设置为1 start - 8data - 1 odd parity - 1 stop.
NV08C-RTK GNSS板卡其它默认设置:
导航模式: GPS和GLONASS
RTCM数据: 自动输出 (DGNSS或RTK模式)
SBAS数据: 请求下输出 ($PONAV NMEA command)
RAIM: 自动
辅助导航数据: 自动输出
导航数据更新率: 1 Hz
NMEA电文: 参考协议文档NV08C Receivers NMEA Protocol Specification
UART2初始设置为RTCMv3 115200 bps.
NV08C-RTK移动UART2接收RTCM数据,基站UART2发出RTCM 数据;
NV08C-RTK基站,置于Base Mode即可自动发出改正信息; NV08C-RTK移动站,置于Rover Mode即可自动接收基站改正信息。
基站与移动站设置语句:
$PNVGRTK,MODE,x NMEA message (see also NV08C-RTK NMEA Protocol Specification):
$PNVGRTK,MODE,2 message turns NV08C-RTK to RTK-Rover mode(by default).出厂默认设置为移动站;
$PNVGRTK,MODE,1 message turns NV08C-RTK to Base mode.设置为基站;
$PNVGRTK,MODE,3 message turns NV08C-RTK to Base mode with antenna position averaging.基站工作模式,取天线相位中心位置平均值。 $PNVGRTK,MODE,0 message turns NV08C-RTK to Autonomous mode.设置为自主工作接收机。
Base setting message基站设置指令:
$PNVGRTK,MODE,3,AVGTIME,N where N is length of antenna averaging interval in minutes, N = 1~1440,即1分钟到24小时;
举例:基站设置1分钟天线位置平均值,语句为$PNVGRTK,MODE,3,AVGTIME,1。
检查基站设置是否成功语句: $PNVGRTK,MODE,BASEXYZ*0F
[PORT,x] x: defines the port number for the following settings
0 – current port; 1 – UART 1; 2 – UART 2; 3 – USB
Note – The field is optional and can be omitted. If the field is omitted the setting are related to the current port
c-c: Addresses of the required messages (3 last characters for standard messages and all address field characters or 3 last characters for proprietary messages)
X: Message output rate in PVT update intervals
Note: PVT update interval (in sec) is a value opposite to PVT update rate (in Hz) (see Message 4.12 PNVGRTK – Setting of RTK Engine parameters )
Setting the output rate to 1 will request messages to output every time a new PVT is calculated. Setting the output rate to N will request messages to output one time after N times of PVT calculation.
[,с-c,х…]When several messages are to be added to the list then the Fields 3 and 4 should be set for each of requested messages
13.NV08C-RTK-A设置
主要设置指令:
1.$PNVGRTK,MODE,4 启动定向,自动输出BLS基线状况及航向。
2.$PNVGRZB,HDT 请求HDT真航向, $GPHDT语句包含在RTK NMEA协议($GPHDT - Heading,True),RTK FW0027版固件开始支持。
3.$PNVGRZB,BLS 请求基线状况及定向参数,包括固定解UTC时间、基于基线的北向、基于基线的东向、基线长度(计算两个天线中心相位长度)、基线与北向的角度、基线与水平的角度、工作模式等。
RTK FW0027固件简要:
NV08C-RTK-A默认RTK+航向工作模式;支持TimeMark EVENT;增加 HDT(真航向), SDP(位置标准方差), SDV(速度标准方差), SDH(航向标准方差), RZD(坐标方差2D RMS), TME(时间周标记事件), TMU(国际时间标记事件), TMC(GPS锁定时间标记事件), VOG(对地速度)输出...
注意:IMU得到偏航Yaw基于PCB板卡、对地速度VOG,而双天线得到航向Heading基于天线相位中心基线。
作者:AIT